
El brazo robot AL5B forma parte de la nueva serie de brazos robóticos metálicos que sustituyen a los antiguos de plástico. Estos brazos tienen todos características muy similares en cuanto a funcionalidad y aspecto, estando la principal diferencia en el tamaño y la capacidad de carga. El brazo esta formado por piezas de aluminio que se acoplan directamente a los servos formando una estructura muy sólida que ejecuta los movimientos con gracia y soltura y una repetitividad muy buena. El brazo tiene 5 ejes, pero se puede ampliar a un sexto eje con el kit de expansión S300137 que añade la rotación de la muñeca. Características Altura máx.: 400 Mm. Carga máx. con brazo extendido: 140 gr. Alimentación 6 V. Este kit incluye todos los componentes necesarios para montar y poner en marcha el robot con una conexión serie a un PC. Incluye la parte mecánica, los 5 servos, la electrónica SCC32 ya montada, el alimentador de 6V, el programa de control RIOS y todos los cables y conectores necesarios para su montaje y puesta en marcha.
La electrónica
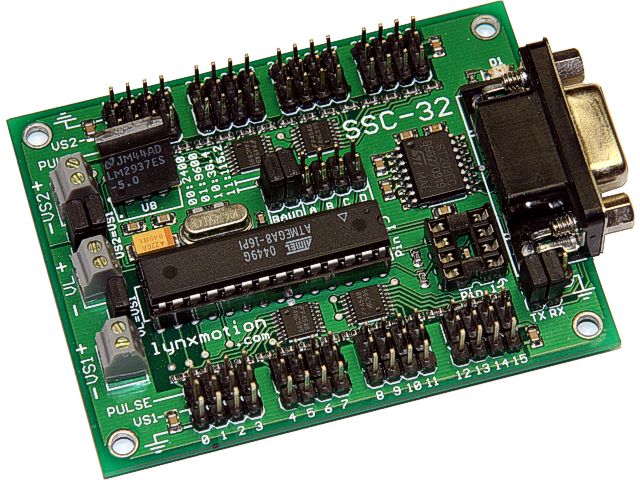
SCC32 es un circuito de control de servos de hasta 32 canales que destaca por su alta resolución, su precisión de movimientos y la suavidad con la que los realiza gracias a que incorpora funciones de control de movimiento basadas en tiempo, velocidad o una combinación de ambas. El circuito tiene un rango de trabajo de 180 grados con una salida que va desde 0,50ms hasta 2,50 ms. La resolución es de 1 uS que garantiza la precisión de los movimientos en todos los servos. Tiene un modo de funcionamiento en grupo que permite que todos los servos del grupo empiecen y terminen el movimiento a la vez con independencia de que unos tengan recorridos mas largos que otros.

También hay un modo de funcionamiento compatible con el circuito MiniSSC II. (consultar el manual de instrucciones). Las salidas de servos, también pueden emplearse como puertos de salida digitales a nivel TTl. Además cuenta con 4 entradas digitales que pueden tener enclavamiento para detectar impulsos de corta duración o incluso pueden emplearse como entradas analógicas. La conexión con el procesador de control se realiza mediante conector DB9 a nivel de RS232 o mediante conector de postes a nivel TTL. La velocidad puede conmutarse entre 2400, 9600, 38400 y 115200 baudios. La alimentación puede ser única para la electrónica y los servos o bien independiente para los servos y para la electrónica. Alimentación 5,5 - 9 V. Recomendada 6V si se va a utilizar la alimentación única.
La mecánica
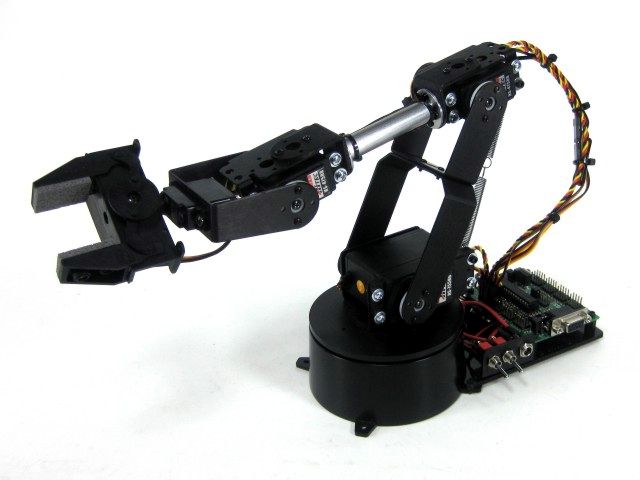
Se incluyen todas las piezas mecanizadas, así como las fijaciones, tornillos, etc. necesarios para construir el robot. También se incluyen 5 servos Hitec de alta calidad y diferente tamaño para cada una de las articulaciones. Todas las piezas del brazo están hechas de aluminio cortadas por láser que le proporcionan solidez y ligereza. La base giratoria y la plataforma del circuito son de policarbonato. El diseño especialmente estudiado del robot, permite que este sea construido fácilmente sin necesidad de conocimientos especiales. Incluso los niños (con supervisión de adultos) pueden montar el brazo robot, ayudándolos a comprender su funcionamiento.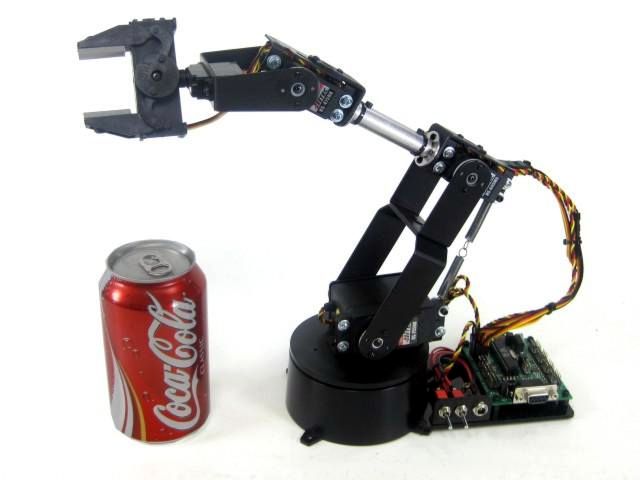
El software
Junto con el kit se incluye una copia completa del programa RIOS S370120. El programa incluye funcione avanzadas para la realización de toda clase de movimientos con el brazo robot incluyendo compensación de gravedad y peso. Permite utilizar un JoyStick del tipo Playstation para controlar el brazo robot. También se puede utilizar un sensor del tipo GP2D12 para capturar imágenes en 3D de forma experimental. El programa permite controlar cualquier brazo robot de hasta 8 canales, ya que se incluyen ajustes y control de los canales 7 y 8 además de los seis utilizados normalmente por el brazo robot.

Como la placa de control SCC-32 se puede poner en modo de compatibilidad de Mini SCC-II esto quiere decir que todos los programas y utilidades escritos para esta controladora, se pueden hacer funcionar sin problemas en el SCC-32. También puede utilizar el software gratuito de la placa de control de servos Visual SC para Windows que permite controlar los movimientos de una forma muy sencilla y gráfica y almacenarlos en un fichero de texto que se puede guardar y recuperar en el disco, o bien exportarlo para utilizarlo en nuestros propios programas. Otros programas y rutinas de utilidad se pueden encontrar mas adelante en la sección Ejemplos y Proyectos.
Información de Pedido
El kit incluye todo lo necesario para construir un brazo robótico completo incluyendo además del brazo robot de 5 ejes, elS310185 Controlador de Servos SSC-32, el S310177 cable serie macho hembra de 1,8m de conexión al PC y elPrograma de Control RIOS S370120. Los servos requieren una tensión de alimentación de entre 4.8 y 7.2 Vdc con una intensidad de 1.5 Amperios por lo que también se incluye un transformador de 6V 2,5 Amp S180635. La placa de control SSC, requiere además de una pila de 9V para alimentar su propio procesador. Dado que su consumo es muy reducido la pila dura muchas horas, por lo que no merece la pena implementar otra solución.
Para controlar el brazo robótico sin un PC, puede usar el S310160 Microcontrolador Next Step junto con el S310205 MICROCONTOLADOR BASIC X24 que además añade puertos de entrada y salida adicionales que pueden ser usados en experimentos mas complejos. Tenga en cuenta que en este caso, se requieren ciertos conocimientos sobre programación y experimentación con prototipos. Consulte este tutorial para mas información.
Para controlar el brazo robótico sin un PC, puede usar el S310160 Microcontrolador Next Step junto con el S310205 MICROCONTOLADOR BASIC X24 que además añade puertos de entrada y salida adicionales que pueden ser usados en experimentos mas complejos. Tenga en cuenta que en este caso, se requieren ciertos conocimientos sobre programación y experimentación con prototipos. Consulte este tutorial para mas información.
Especificaciones Técnicas

| Número de Ejes: | 5 Incluyendo la pinza |
| Control de los servos: | Bucle cerrado local |
| Altura en reposo: | 162 mm |
| Altura máxima: | 400 mm |
| Alcance medio: | 190 mm |
| Apertura de la pinza: | 32 mm |
| Carga máxima extendido: | 126 g / 5 oz aprox |
| Peso sin baterías: | 652 g / 23 oz |
| Rango de giro por eje: | 180 º |
| Precisión en cada eje: | 0.72º |
| Tensión de los servos: | Nominal 6V Puede usarse con 7.2V |
| Consumo en reposo: | 10 mA cada servo. |
| Consumo en movimiento: | 130 mA cada servo |
No hay comentarios:
Publicar un comentario